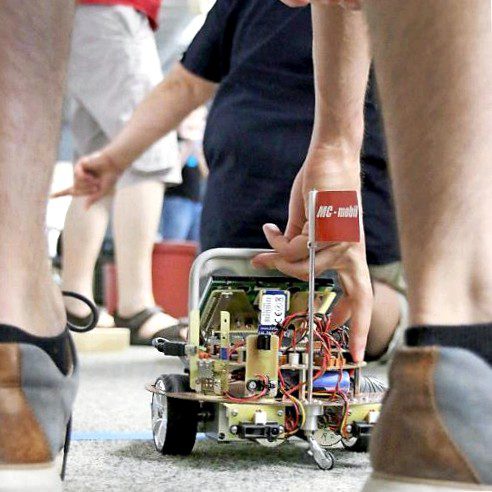
Robot races in the lab: students at coburg university teach robots to recognize and avoid obstacles. Two wheels, two motors, ultrasonic sensors, a compass, a cortex M3 microcontroller, a lithium-ion battery – the small robots don't need much to drive autonomously. It's all about strategy: how does the robot react when it detects an obstacle?? "Microcomputer technology, programming, sensor technology – what the students have learned so far, they have to combine here", explains prof. Michael engel. He offers the seminar as an elective module in the sixth semester. Computer science and electrical engineering students collaborate and complement each other's knowledge. For one semester they test strategies, discard them, look for new ones. "Actually, we teach the students how to find mistakes", laboratory engineer udo schader sums it up. He built the robots. Students should work with real hardware and not only program for theory.
At the end of the semester, they show what their robot has learned. The course is set up in the microcomputer laboratory. The success varies. Some have to take their robot off the track at some point, because it got stuck between two bars. The others cheer as their vehicle safely passes through narrow passages and avoids buckets and other obstacles. After three rounds with different levels of difficulty, it is clear: christian konig, sebastian michel and oraz serdarov decide the race for themselves. Her robot was on average the fastest – never touched an obstacle on the track and never had to be released from a dead end. Christian konig, sebastian michel and oraz serdarov tested three complex strategies, then decided on a simpler variant. Your robot moves forward until it hits an obstacle. First he tries to see if he can get ahead on the right. If not, he turns left and looks for an opportunity on this page. If it can't go left or right, it goes backwards and then to the side with the most distance to the next obstacle.